
SVD之最小二乘【推导与证明】
0.SLAM中SVD进行最小二乘的应用
在SLAM应用中,计算Homography Matrix,Fundamental Matrix,以及做三角化(Triangulation)时,都会用到最小二乘
1.背景
对一堆观测到的带噪声的数据进行最小二乘拟合
2.理论模型

3.优化目标
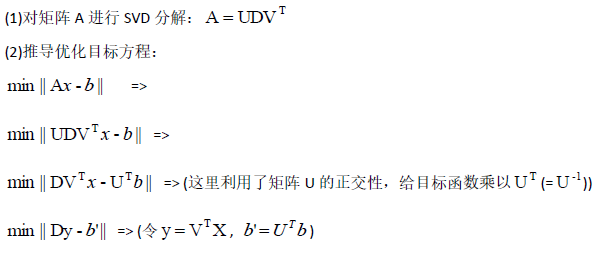
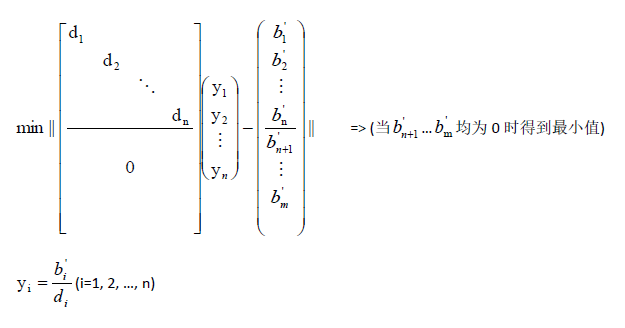
4.优化过程
5.工程实现

6.对齐次方程,利用SVD做最小二乘最优解的证明(感谢@刘毅 的推导)


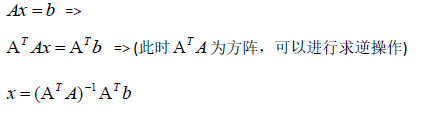
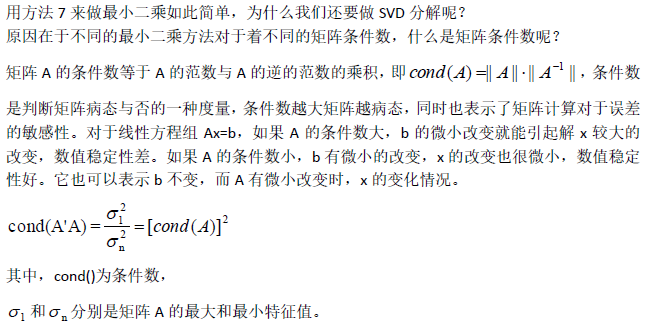
7.其他非齐次方程组做最小二乘的方法
8.不同的最小二乘方法的讨论
9.本篇文章的理论出处
上述推导并不复杂,但是如果你想明白最小二乘优化的来龙去脉,推荐你看《Multiple View Geometry in Computer Vision》中的附录5:Least-squares Minimization
10.致谢
感谢 @刘毅 关于齐次方程组的SVD做最小二乘的的推导证明。
感谢 @黄山 关于矩阵条件数的介绍,以及一些相关的证明推导。
感谢 @泡泡机器人 的其他成员的激烈讨论。
posted on 2016-07-12 13:11 Brad_Lucas 阅读(5818) 评论(2) 编辑 收藏 举报


